高度情報システム科 ブログ
ETロボコン2018への長い道 (その2) 「較正」ってなんだ?
2018.06.15
ETロボコン2018への長い道 (その2)
技術教育2が終わり、やることがいっぱい出てきました。
モデリングも進めなければならないし、C/C++言語も勉強しなおし。肝心のロボットプログラミングもやっと基礎的な機能の確認が終わった程度。問題山積みですが、一つずつ、がんばっていきましょう。
現在は、「ユースケース図」と「ユースケース記述」を、メンバー各人で作成し、みんなでレビューをしたり、あれこれ悩んでいます。
とっかかりとして、昨年度のロボコンで優秀な成績をおさめたモデル図を横目で見ながら、真似っこでよいので、とにかく作ってみよう、という姿勢でやっています。
その作業の過程で、メンバーの一人が作成したユースケースにあるキーワードがありました。
「較正」(こうせい)
「較正」って何?
いや、失礼。ごめんなさい。 無知なことを晒していますが、聞いたこと、見たことないです。
確認したら、これは「Calibration(キャリブレーション)」の日本語訳ですね。手元の辞書には、「(測定器などの誤差を)基準に照らして正すこと」(新明解国語辞典<第四版>) と書かれています。まさしくその通り。
キャリブレーション!
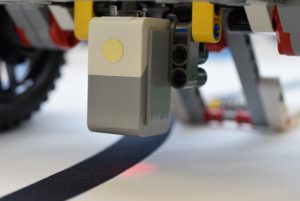
ロボコンの競技においては、主に、スタート前にカラーセンサ―の値を計測して、その値を基準に検知した値の補正をしていくことを意味します。
これをモデルの中にどう組み込むか、なかなか難しいところです。昨年は、無理に変なところに押し込まないで、という指摘をうけているので、考えどころです。設計の過程でキャリブレーションを考慮に入れるのは、成長したことになるのかな。
モデルはモデルとして、学生には、カラーセンサ―の使い方を教えたいので、簡単な課題を出しました。これができないようなら、キャリブレーションのキャの字もできません。
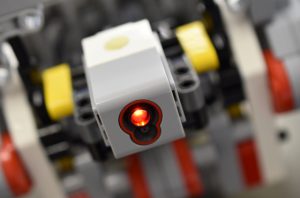
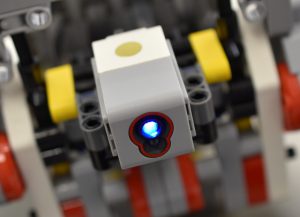
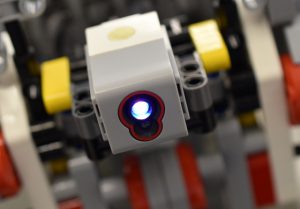
(1) 反射光の値(白い部分、黒いライン)を測る。(2) 環境光を測る。(3) 色情報を取得する。
この3種類の情報を1つのセンサーのモードを切り替えて取得します。以下、その時のセンサーの状態です。
そして、動かしてみる。

結果をチェックする。
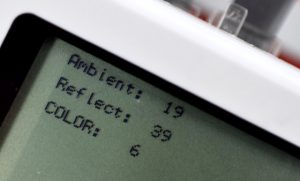
ま、こんなもんでっしゃろ。もっと実用的なものは、いずれまた。
ところで、次回のオープンキャンパスは、このロボットを使った体験授業です。
難しいことは抜きにして、ロボットに触りに来るつもりぐらいで、遊びに来てください。

そうそう Sota も待っていますよ。
予約はコチラから。