ブログ
ブログ一覧 (全1738件中 1267件目~1269件目を表示)
2019.10.04
こんにちは!医療事務科の嵯峨です!
今回、医療事務科の1、2年生はアルヴェで
行われた福祉用具展示会に参加しました(*^_^*)全国から約45メーカーさんの最新の福祉用具が
秋田に集結するとても大きなイベントです!介護用ロボットや、電動車椅子、最新オムツ、シューズやリフトなど実際に触れたり、乗ってみたり
学生はどのブースも興味津々でした。
中でも学生が興奮したのは、車椅子からベットへの移乗が体験できるブースです。
実際に車椅子から専用の機械で移動し、ベットに横になるまでを紹介していただきました。


学生は非常に緊張しており、固まっています(*^-^*)
様々な細かい確認は必要ですが、とても素早く丁寧に移動が可能となり、これは利用者さんも
安心して移乗が可能になると思いました。何事も実際に目で見て、体験してみる。
それが一番大事ですね!
福祉、介護についてたくさん学んだ一日でした。最後はたくさんのお土産もいただき、ありがとうございました。

2019.10.02
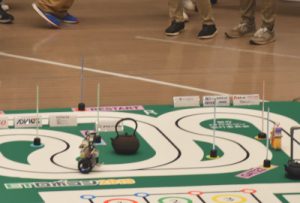
ETロボコン2019 東北地区大会 in 盛岡です。とうとうやってきてしまいました。


受付をすませるなり、いきなり試走。右往左往するわたしたち。


本番コースを見つめる3年生チーム。何やら悪だくみしていないか?

走行しているうちに、開会式。気もそぞろ。落ち着きません。
最初は2年生チーム、Rコースに登場。

ショック! スタートできず。(ああ、やっぱりロボットの組立てミスがここにきて...、後悔先に立たず)


3年生チームは、Lコースから。お、スタートしたぞ、いいかも。


うっ、危ない。コースアウトして、Rコースに行くかと思いきや回避。ゴールならず。


失敗したわりには、余裕のある3年生チーム。


ビビりながら待機する2年生チーム。今度はLコース。


がんばれがんばれ、と念を送るものの... うぅ、やっぱりスタートできず。残念!

相変わらず余裕の3年生チーム。Rコースで待機中。この不敵さはどこから来ているのだろうか?

おお、ゴール! 行け、ゲートをくぐるんだ!


バッタン。あらら、ゲートを倒してここで終了。もうちょっと頑張ってほしかった!

アドバンストクラスのレースの見学。うまく説明できませんが、チームごとの個性がぶつかりあって大変盛り上がりました。

モデリングワークショップ、表彰式へと続きます。
結局、2年生チームは15位、3年生チームは8位でした。まだまだ修行が足りないかな。来年に向けてやることがまたまた山積みになります。まずは、夏休みの計画を綿密にすることかな?
まずは、両チームの皆さん、お疲れさまでした。
お久しぶりです!ホテル・ブライダル科1年 みくりです。
9月も終わり昨日から10月ですね。気持ちを新たにして後期も頑張っていきたいと思います。
9月26日にTOEICの試験が行われました。2時間くらいの試験時間で大変でしたが英語の授業で鍛えた語彙力や英語力でなんとか乗り越えることができました。結果は前回と比べると少し下がっていましたが、この結果を肝に銘じて次のTOEICの試験に向けて気持ちを切り替えて勉強していきたいと思います。


他にも硬筆検定やマナープロトコールの検定などがあります。これからは検定が多くなってくるので、後期は資格取得に向けて頑張っていきたいです。資格取得は就職にも役立つので一つ一つ気合を入れて合格に向けて勉強をしっかりしていきます!
10/5オープンキャンパスのご予約はこちらからお願いします!
ホテル・ブライダル科「インスタグラム」はこちら☆


